Introduction:
Avec l'essor de l'industrie de l'intelligence artificielle, la demande du marché en matière de fonctions d'interaction homme-machine et de qualité des produits augmente, c'est pourquoi des robots cartésiens industriels sont conçus et deviennent une bonne aide pour une production efficace.

Principe de fonctionnement:
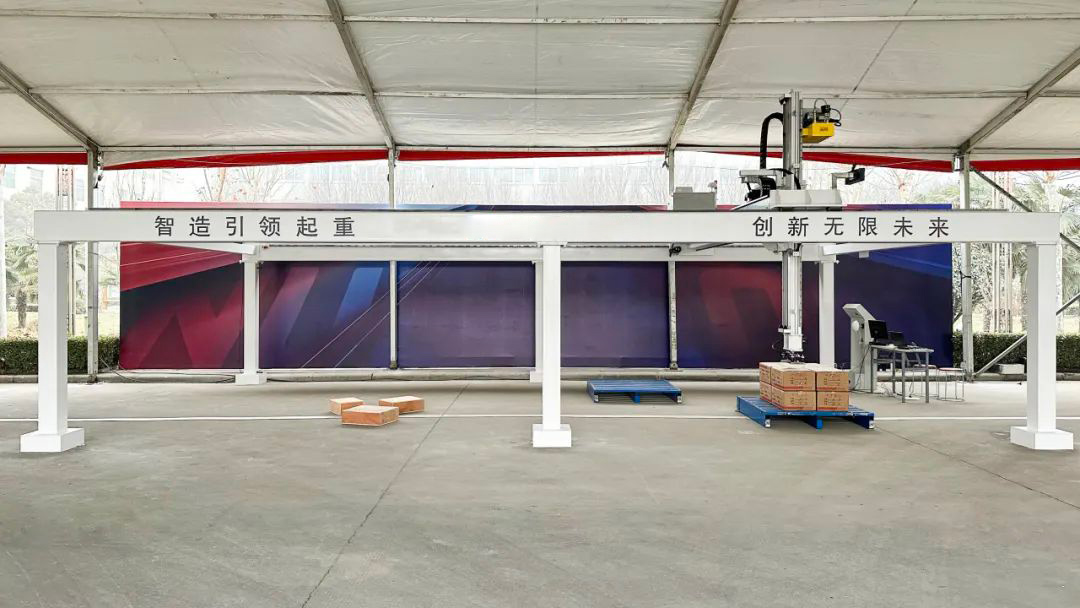
Un robot cartésien, ou robot linéaire ou robot portique, est un robot industriel doté de trois axes de contrôle linéaires perpendiculaires les uns aux autres. Les trois articulations glissent de haut en bas, dedans et dehors, et d'avant en arrière, ce qui permet le mouvement du poignet. Les axes se déplacent de manière coordonnée via un contrôleur de mouvement. Les trois axes sont X, Y et Z, et l'axe de base est généralement soutenu sur toute sa longueur, tandis que l'axe Y ou Z est en porte-à-faux.
Application:
Ce robot à portique est largement utilisé dans les domaines de la production industrielle tels que la distribution, le moulage goutte à goutte, l'assemblage, le soudage, la pulvérisation, le chargement et le déchargement, la manutention, le tri, la palettisation, l'entreposage intelligent et le transport.
Caractéristiques:
1. Positionnement précis
Ce robot cartésien est durable, facile à utiliser et peut être associé à différents types d'équipements et de processus de traitement. Il a pour fonction de charger et de décharger des matériaux et adopte un servomoteur, une transmission à crémaillère et un guidage de précision par rail coulissant, qui peuvent être localisés avec précision.
2. Haute efficacité
Ce robot cartésien est souvent associé à des machines-outils, des courroies de transmission et des silos pour former des lignes de production automatisées, complétant le chargement et le déchargement, le retournement des pièces et le séquençage des pièces à arbre, plaque et disque, réduisant ainsi l'intensité du travail et améliorant la capacité de production. , améliorant considérablement l'efficacité de la production et réduisant les coûts de main-d'œuvre.
3. Bonne flexibilité
La structure en treillis de ce système robotique lui permet de se déplacer et de s'ajuster librement, réalisant ainsi diverses opérations. Cette flexibilité permet aux robots en treillis de s'adapter aux différentes exigences des tâches, telles que l'assemblage, le soudage, la manutention, etc.
4. Sûr et fiable
Ce robot est équipé de capteurs et de systèmes de contrôle avancés, qui peuvent surveiller et ajuster l'état de fonctionnement du robot en temps réel, obtenir un fonctionnement de haute précision et garantir la stabilité et la fiabilité de la qualité du travail.

